Lemken müüb atra Juwel 8 ka ISOBUS-versioonina 8i. Suhteliselt lühikeses testis uuris profi, mida „i“ oskab.
Kui 2010. aastal tutvustati Juweli seeriat, leidsid elektroonilised komponendid esimest korda tee Lemkeni atradesse. Kõik sai alguse pöördenurga andurist, mis võimaldas külgkallet ilma piirajateta reguleerida. Sammu edasi astus ISOBUS-võimeline Turn Control Pro mudelis Juwel 8TCP. Lisaks paljudele ühe nupuvajutusega tehtavatele seadistustele võimaldab see ka vao automaatset õgvendamist GPS-toega.
Atrade Juwel 8 i-varustusega on Lemken süsteemi veelgi edasi arendanud. Märkimisväärsed uuendused hõlmavad lihtsamat tööd eelseadetega ja GPS-juhtimise edasiarendamist. Sellega kaasneb ühe piirangu hoiatus – kuid sellest lähemalt hiljem. Juwel 8i oli sügisel paar päeva testimiseks saadaval.

Riistvara peaaegu identne
Juwel 8 on i-variandis saadaval ISOBUSi ning 140 x 140 mm ristlõikega ja 10 mm seinapaksusega raamitoruga. See põhineb mudelil Juwel 8MV, mille raami kõrgus on 85 cm ja sahkade vahekaugus 1 m. Põhivarustuses on raami kõrgus 80 cm, 5 cm rohkem on saadaval lisatasuga 86 eurot sahapaari kohta. Ader on müügil nelja, viie ja kuue sahaga. Juweli seeria piires on võimalikud ka muud ristlõiked ja vahemaad, kuid siis ilma ISOBUSita.
Kõige lihtsama variandi ISOBUS-varustuses on nii esimese saha töölaiuse, üldise töölaiuse kui ka kaldenurga elektrooniline reguleerimine. Soovi korral saab ka tugiratta sügavust terminali kaudu seada (lisatasu 1220 eurot). Juhtseadmesse on integreeritud ka prooviadrale paigaldatud Flex Pack (14 110 eurot). Onland-versioonil OF (3488 eurot) on siia integreeritud ka veopunkti reguleerimiseks mõeldud spindli asemele hüdrosilinder. Vaos kündmine jääb siingi võimalikuks.
Juwel 8i „elektrooniline süda“ lööb kahes kohas. Kõigepealt on ISOBUSi tööarvuti paigaldatud haakepea paremale küljele musta katte alla. Peale selle asub raamil juhtseade andurite ja täiturmehhanismide jaoks. Need võimaldavad juhtimist ühe nupuvajutusega. Käskude täitmise eest vastutavad mitmesugused raamile ja haakepeale paigaldatud hüdraulikaklapid. Kogu süsteemi paigutus tundub veel veidi korrastamata, kuid Lemken kavatseb seeriatootmise käigus paigutust ja katteid kohendada.

„Ahhaa“ haakimisel
Põllumees kogeb esimesi ahaa-hetki adra ühendamisel traktoriga. Kui eelmine kasutaja on terminalis parkimisasendi valinud, näeme, et Kat. III aiste ühenduspunktid kulgevad paralleelselt maapinnaga – praktikas see aga enamasti nii ei ole.
Pärast väga lihtsat haakimist on aeg hüdraulikaühendusteks. Siin tuleb ahhaa-hetk number kaks: vaatamata paljudele funktsioonidele piisab kolme loadsensing-liitmiku ühendamisest. See on kiire ja lihtne, kui ühendused sobivad – paraku pole see traktori poolel veel sugugi iseenesestmõistetav. Lisaks ei tohiks ununeda ISOBUSi pistik. Vajadusel tuleb veel ühendada pistik valgustuse jaoks (948 eurot, kõik hinnad kehtivad Saksamaal ja on antud käibemaksuta) – ja kõik ongi valmis.
Lühidalt saha ette rakendatavast traktorist: 150 hj on viiesahalise Juwel 8i jaoks paljudes tingimustes teoreetiliselt piisav. Kuid selle klassi traktorid jõuavad FlexPacki tõttu oma võimete piirideni. Pakker lisab adra kaalule tublisti üle 500 kg. Meie kasutatud John Deere 6150 R vajas vähemalt 2,2 tonni esiballasti. Sellele adrale sobivad seega paremini traktorid võimsusega 180–200 hj.

Kabiinis kasutamiseks on saadaval tavaline ISOBUSi valik: kui traktoril on ISOBUS-terminal, saab selle määrata adrale, kuid loomulikult saab kasutada ka alternatiivseid kuvareid. Nii Müller Touch 800 kui CCI 1200-ga saime adraga probleemitult hakkama.
Võrreldes eelkäijaga on Lemken kohandanud kasutajaliidese vastavalt oma tööfilosoofiale. Algvaade annab hea ülevaate hetkel valitud töölaiuse, külgkalde, künnisügavuse ja esimese saha töölaiuse seadistustest.
Kündmine stsenaariumide järgi
Neli stsenaariumi (kaheksa Onland-versioonil) on nähtaval kohal ka standardvaates, millest valitu kuvatakse koos kirjeldusega suuremalt. Vabalt nimetatavad stsenaariumid aga on sisuliselt vabalt määratavad mälukohad. Salvestada saab kalde paremale ja vasakule, töölaiuse, töösügavuse ja esimese saha töölaiuse väärtusi.

Kui soovitakse stsenaariumi välja kutsuda, tuleb esmalt valida ekraanil vastav nupp ja aktiveerida see uuesti puudutades. Seejärel juhib ader stsenaariumi seadeid ning esitusnool (Play) muutub roheliseks – kõik on väga selge. Stsenaariumidega töötamine on väga praktiline ja aitab leida optimaalseid seadeid. Kui juht soovib midagi proovida või teha vaid lühiajalisi kohandusi, saab ta kiiresti algseadete juurde tagasi pöörduda.
Selge on ka selle taga olev loogika: seni, kuni stsenaariumi nool on rohelise taustaga, on ka salvestatud väärtused aktiivsed. Kui midagi muudetakse, kaob roheline märgistus. Stsenaariumi taastamiseks peab juht selle lihtsalt uuesti valima. Kui stsenaariumi soovitakse salvestada uut sätet, tuleb lihtsalt stsenaariumi nuppu vajutada ja pikemalt all hoida.
Töötasime sageli stsenaariumidega ja nautisime nendega töötamist. Kui aga esimese ja viimase vao seadistustega on juba kaks stsenaariumi hõivatud, jääb adra seadistusteks töö ajal alles vaid kaks. Seda on väga vähe: kui näiteks künnate integreeritud FlexPacki kasutamata, on vaja teistsuguseid seadistusi, ning rohkemaks ruumi polegi. Rohkemate stsenaariumidega saaks salvestada ka mitmesuguseid töösügavusi ja erinevaid pinnasetingimusi. Siis poleks tarvis iga kord õigeid seadistusi leida, kuigi see käib suhteliselt kiiresti.

Sirgelt kündmine
Olgu kohe öeldud, et Juwel 8i-ga sirgete vagude tõmbamiseks pole GPS-juhtimine vajalik. Sellegipoolest võib see teatud kasutusalade puhul olla õigustatud, näiteks kui järgnevate põllukultuuride puhul on vaja eriti täpset istutamist. Siis peaksid vaoharjad kulgema võimalikult täpselt istutus- või külvisuunaga paralleelselt.
Kui soovitakse Juwel 8i selliselt täiendada, saab seda teha ainult CCI ISOBUS-terminali abil – see ongi artikli alguses märgitud piirang. Vaja läheb ka GPS-i töölaiuse reguleerimise juhiste, CCI.Command PT ja CCI.Command SC litsentse. Litsentsipakett maksab 3192 eurot. Kõigele sellele lisaks on tarvis ka DGPS-signaali – kas traktorist ISOBUSil või otse terminaliga ühendatud antenni kaudu.
Traktorilt peab tulema ka rippsüsteemi asendi signaal. Seegi võib saabuda kas ISOBUSi või vastava signaalipesa kaudu. Terminalis saab muuta signaaliallikat ning töö- ja tõsteasendite väärtusi. Sõidukiiruse signaal võetakse samuti ka traktorist või alternatiivselt GPS-i kaudu.

Sel viisil relvastatuna saab juht terminalis teha seadistusi töölaiuse seadeväärtuse ning minimaalse ja maksimaalse väärtuse jaoks. CCI.Commandis läheb vaja ka A-B-joont, mis võib olla ka kontuur. Pärast stsenaariumi aktiveerimist saab nüüd roolimisfunktsiooni sisse lülitada.
Töötamisel eristab terminal võrdlusjoont ja tööjoont. Tööjoon on võrdlusjoon, mida parajasti juhtimiseks kasutatakse. Seda reguleeritakse töösuunas iga kord, kui atra tõstetakse. Võrdlusjoon on joon, millele traktor ja ader asuvad sel hetkel kõige lähemal.
Kui tööjoon ja võrdlusjoon on samad, saab ader end reguleerida. Kui võrdlusjoon kaldub kõrvale, näiteks vagu kaldub vajalikust suunast liiga kõrvale, peatub reguleerimine. Juht tunneb selle ära kahe joone väärtuste erinevusest. Kui atra tuleb vahepeal ilma pööramata tõsta, siis tööjoon edasi ei lähe. Praktikas pole seetõttu peaaegu üldse vaja tööjoont käsitsi reguleerida. Kui see peaks nii olema, näiteks seetõttu, et olete kursilt kõrvalekaldumist parandanud, saate ekraaninupu abil viia tööjoone tagasi õigele võrdlusjoonele.

Sihile kündmine
Selle süsteemiga muudab ka sihi-A-B-joone poole liikumise lihtsaks. Näiteks võib see olla mitte-ristkülikukujulise põllu teine külg, kuid võimalik on ka sihtkontuur. Tegevus toimub järgmiselt: juht loob piki sihtjoont (ilma kündmiseta) A-B-joone või -kontuuri. Pärast seda künnab ta esimese vao vastasküljel ja viib seejärel tööjoone ja võrdlusjoone terminalis kooskõlla, eelistatavalt A-B-joonele lähimas põllunurgas. Ader juhib end nüüd sihtkontuuri suunas.
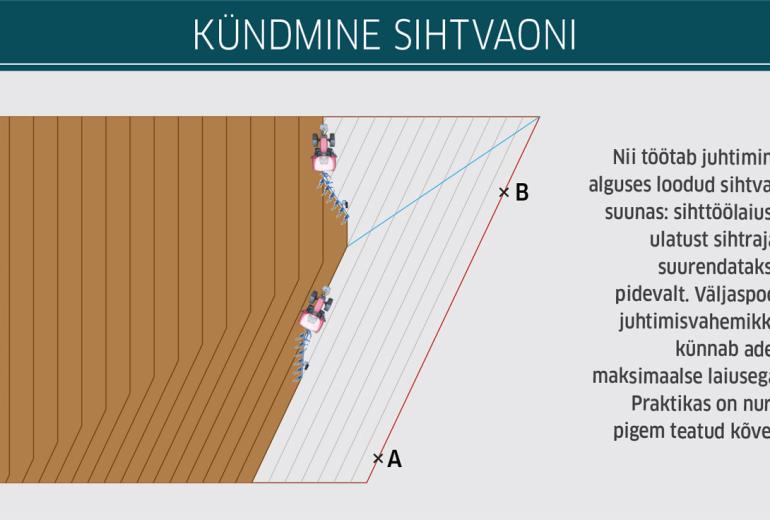
Nagu näitab graafik „Kündmine sihtvaoni“, ei reguleeri ader laiust pidevalt kogu raja pikkuses. Pigem orienteerub ta võimalikult kaua tööjoonele ja püüab seda hoida. Sihtkontuur ehitatakse üles pidevalt, luues kündmismustrisse diagonaali. Praktikas on see suhteliselt järsk pööre pigem mingi kõvera kujuline.
Kui palju tõuse ja laskumisi ader sihtkontuurini jõudmiseks vajab, sõltub töölaiuse, st reguleerimisvahemiku jaoks seatud parameetritest. Graafikul esitame lihtsa näite. Piirkonnas, kus juba sihtjooneni on jõutud, töötab ader oma seatud töölaiusega ja hoiab muidu vao sirgena. Väljaulatuva osa töötlemise seadevahemik jääb seega sihttöölaiuse ja maksimaalse töölaiuse vahele, mitte miinimumi ja maksimumi vahele.

Näide: Kui maksimaalne laius on 2,50 m, sihtväärtus on 2,00 ja minimaalne väärtus 1,70 m, siis on väljaulatuvate osade väljakündmiseks võtta 0,50 m. Põllu laiuse 20-meetrise erinevusega üleval ja all on vaja vähemalt 40 rada, et jõuda täielikult ülemise nurga A-B-jooneni.
Ka põllumajanduslikud eesmärgid võivad seadevahemikule kitsad piirid määrata. Kui põllumees soovib raskes mulla jätta üsna jämeda talvevao, ei ole liiga kitsas seadistus ideaalne. Vastupidi, sügisese mullaharimise puhul: kui rootoräke on liiga lai, peab see tarbetult intensiivselt töötama. Kerged ja keskmised mullad jätavad seevastu üldiselt rohkem manööverdamisruumi.
Kündmine pakkerulliga
FlexPack suutis meid veenda testis, mille viisime läbi peamiselt kergete ja keskmiste muldadega põldudel. Püsiva kinnitusega pakkeri juhtimine on hästi integreeritud. Parkimisasendit aga siiski ei jälgita, kuigi tööseadistuste või stsenaariumidega seoses oleks see võimalik. Kui pakker on transpordiasendisse pööratud, siis see küll töötab, kuid kivikaitse rakendumisel võib tekkida probleeme.
FlexPack reguleerib oma töölaiust koos adraga. Põlluservas saab sellega ettevaatlikult ka allalastuna sõita ja see töötab siis isegi kaasa. Pakkerulli pööramine on integreeritud pööramisprotsessi. FlexPacki saab pöörava silindri kaudu survestada kahes reguleeritavas astmes. Pinnase tihendamiseks võtab see adralt raskust.

Veel üksikasju
• Atra pööratakse terminalil kujutatud nupu abil. Sarnaselt paljudele muudele seadistustele saab seda funktsiooni määrata ISOBUSi abiseadmetele (Aux-N). Näiteks saab kasutada traktori juhtkangi.
• Töösügavust tugirattal saab reguleerida protsentides või sentimeetrites. Sentimeetrites reguleerimine nõuab kahepunktilist kalibreerimist, mida tuleb korrata, kui mullatingimused muutuvad.
• Kõikide hüdraulikafunktsioonide kiirust saab ISOBUS-terminalis väga lihtsalt seadistada – väga mugav.
• Tulevikus peaks Juwel 8i olema ühendatud Agrirouteriga ja saama värskendusi interneti kaudu.
• Isegi kui see on paljudel juhtudel juba standardne: atra tuleks kasutada hüdraulilise ülemise tõmmitsaga, et kõiki seadistusi saaks täielikult kabiinist teha.

Kokkuvõte
Mudelil Juwel 8i täiendab ulatuslik hüdraulika- ja elektroonikapakett tugevat põhikonstruktsiooni. Eelkõige muudab see reguleerimise väga lihtsaks, muuhulgas ka seetõttu, et Lemken on stsenaariumidega leidnud kasutajale hea tööviisi: alati saab lihtsalt tagasi pöörduda end tõestanud seadete juurde.
GPS-toega kündmine on võimalik, kuid mitte kohustuslik. See nõuab ulatuslikku varustust, mis tõstab 8i niigi kõrget hinda veelgi ja seetõttu kasutatakse seda tõenäoliselt ainult erinõuete jaoks. Eelkõige sihtvao poole kündmine annab aga aimu võimalikest tulevastest arengutest autonoomse töö suunas.
Vaata ka videot profi testist!